A modular, remotely operated robotic machine designed for safe deployment in hazardous
environments. It can be flexibly adapted to in-field needs and perform a variety of tasks
depending on the situation at hand. It was built primarily for demining, but you can adapt it for
various engineering purposes – earthmoving, milling, loading...
Remote operation up to 6.5 km, reliable even in jammed environments
Powerful drive and hydraulics
280 kW (375 HP) of power, 42 MPa working hydraulics with a flow rate of 360 L/min
Long operation
Typical consumption of 10 L/h. Up to 10 hours of runtime on a single
tank under load
Why the Invitech iRMP-3?
The Invitech iRMP-3 was developed as a rugged, modular robotic platform for work in
demanding and hazardous environments. Thanks to remote control, powerful hydraulics, and
interchangeable work modules, it can carry out tasks where operator safety, performance, and
adaptation to the mission at hand are decisive. From demining to earthmoving, milling, loading,
and handling – the iRMP-3 offers a versatile solution for professional deployment in the field.
Risk-free deployment
Designed for work in contaminated and dangerous environments,
where the machine works in place of a human.
Modular platform
One chassis, five configurations: demining unit, miller, excavator,
loader, and manipulator, as needed in the field.
High working force
A lifting force of 110 kN and a traction force of nearly 69 kN handle
demanding earthmoving and engineering work.
Reliable field service
Low failure rates and easy on-site maintenance reduce downtime
and logistical demands.
The iRMP-3 is designed so that most service interventions can be
carried out directly at the place of deployment — without needlessly moving the machine out of
the hazardous environment.
Easy access to service points
The machine's design allows quick access to key
components and assemblies. This shortens maintenance time and any field repairs.
Low failure rate, more work done
Thanks to its low failure rate and easy maintenance,
the iRMP-3 stays in service longer. That means less downtime and higher machine availability
throughout the mission.
Attachments
The iRMP-3 is designed as a modular robotic platform that turns a single remotely operated chassis into a specialized machine according to the mission at hand. Thanks to powerful hydraulics and quick swapping of work modules, the operator can adapt the machine to a given task directly in the field — from demining and earthmoving to load handling
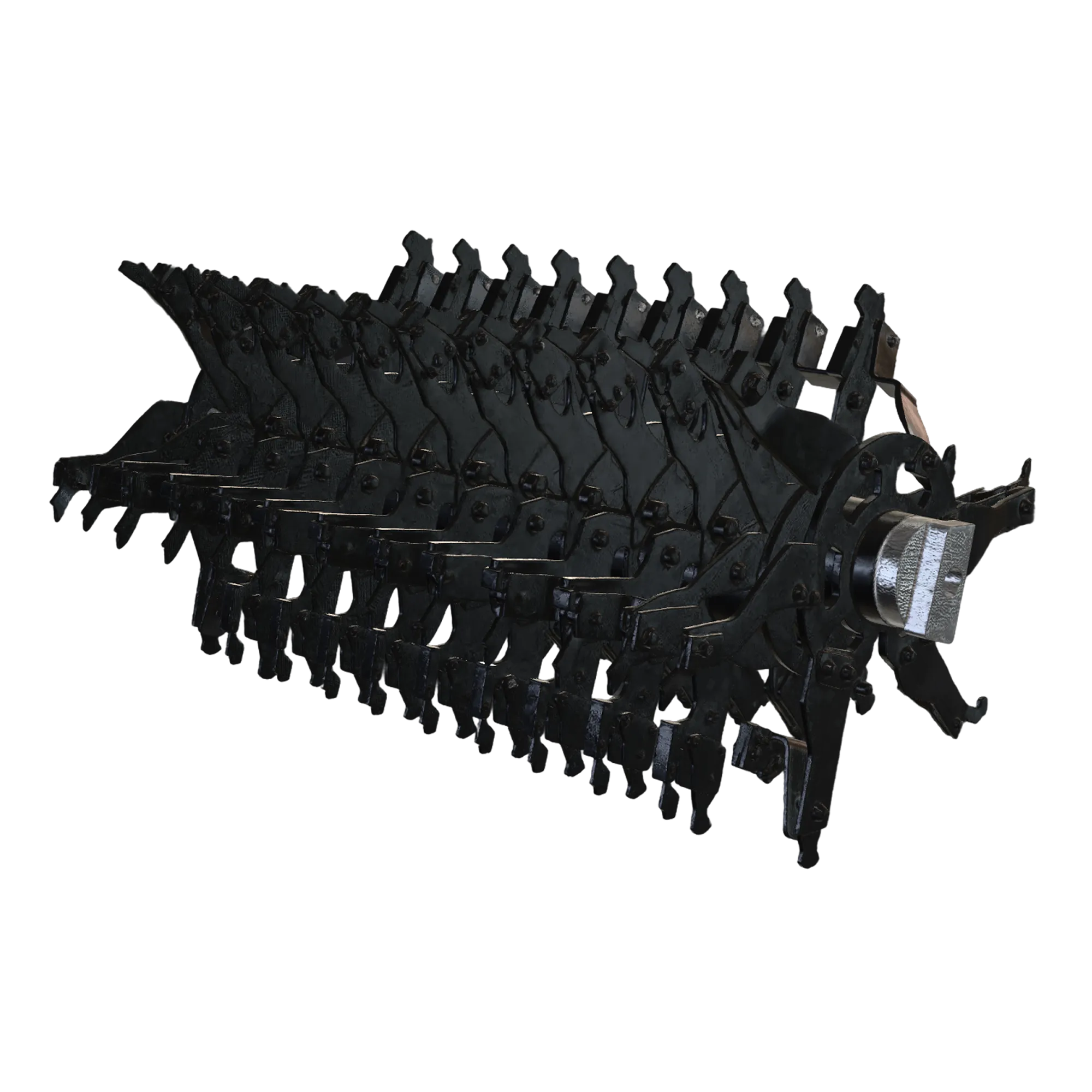
Demining module
The platform's main module, designed for safe clearing of
contaminated terrain. The 3,400 mm-wide working unit processes the soil to a depth of 50–350
mm and removes explosive devices without an operator present in the hazardous area.
Milling module
A rugged miller for breaking up and processing hard surfaces, overgrown
soil, or compacted layers. Suitable for terrain preparation and as a complement to demining
work in demanding conditions.
Excavator
A module for precise earthmoving — trenching, digging, and terrain shaping.
It lets the machine work where controlled digging is needed instead of bulk loading.
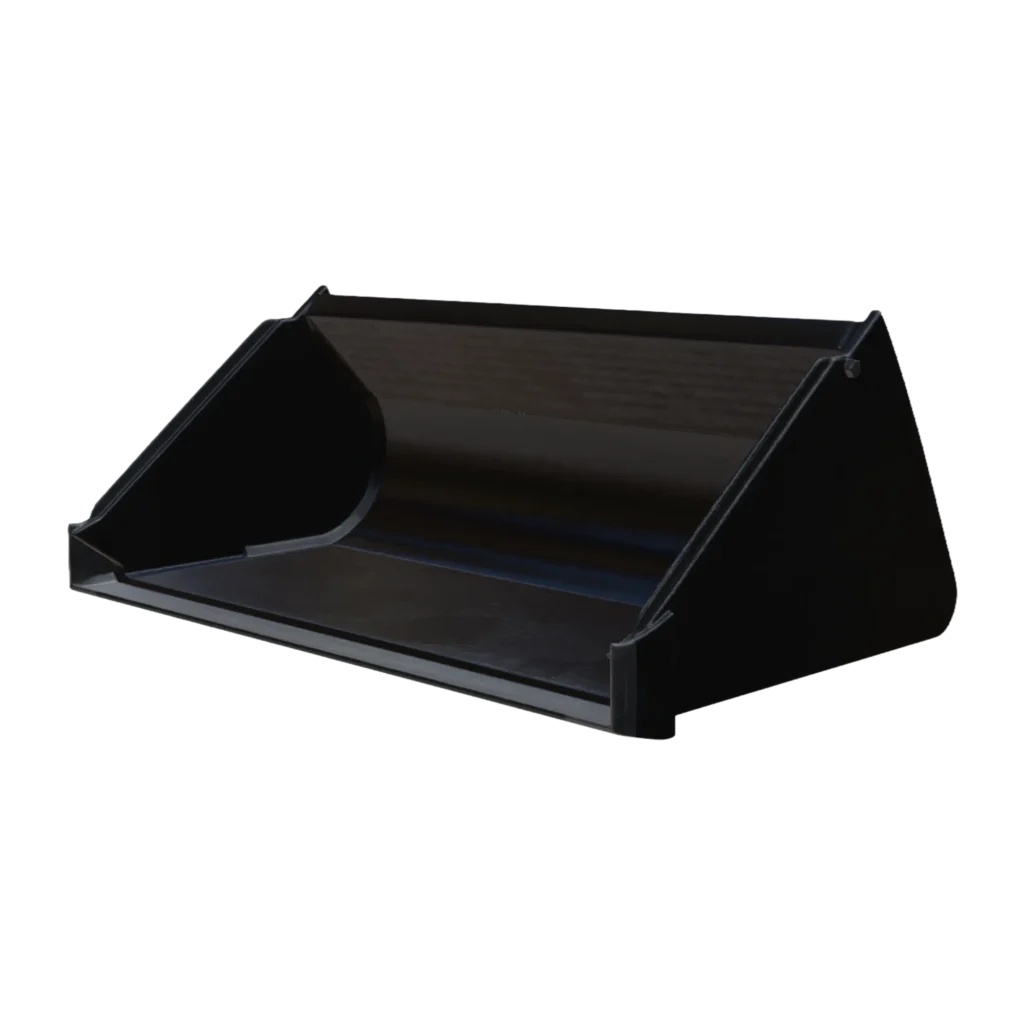
Loader module
A powerful 0.85 m³ bucket for earthmoving, loading, and moving bulk
material. Its 110 kN lifting force handles even demanding cycles during remediation and
construction operations.
Robotic arm (manipulator)
A robotic arm for gripping and handling bulky or hazardous
material. It extends the platform with precise remote operations — from relocating loads to
working with payloads in hazardous environments.
Drilling module
A hydraulic auger for drilling holes into the ground — setting posts,
foundation work, or preparatory engineering tasks.
Request price for the iRMP-3
Interested in a modular, remotely operated robotic machine? Fill out the form and we'll
prepare a no-obligation quote along with more detailed information about the machine.





{kind=link}
{kind=link}