Máquina robótica modular de control remoto, diseñada para un despliegue seguro en
zonas de riesgo. Permite adaptarse de forma flexible a las necesidades en el terreno y realizar
diversas tareas según la situación del momento. Fue concebida principalmente para el
desminado, pero puede adaptarse a distintos fines de ingeniería: movimiento de tierras,
fresado, carga...
Control a distancia de hasta 6,5 km, fiable incluso en entornos con
interferencias
Accionamiento e hidráulica potentes
Potencia de 280 kW (375 HP), hidráulica de trabajo de 42 MPa con un caudal de 360 L/min
Larga autonomía
Consumo habitual de 10 L/h. Hasta 10 horas de funcionamiento con
un solo depósito en carga
Por qué el Invitech iRMP-3?
El Invitech iRMP-3 fue desarrollado como una plataforma robótica modular y robusta para
trabajar en entornos exigentes y de riesgo. Gracias al control remoto, a su potente sistema
hidráulico y a la posibilidad de intercambiar módulos de trabajo, puede ejecutar tareas en las
que son decisivas la seguridad del operador, el rendimiento y la adaptación a la misión del
momento. Desde el desminado hasta el movimiento de tierras, el fresado, la carga o la
manipulación, el iRMP-3 ofrece una solución versátil para el uso profesional en el terreno.
Despliegue sin riesgo
Diseñado para trabajar en entornos contaminados y peligrosos,
donde la máquina trabaja en lugar de la persona.
Plataforma modular
Un solo chasis, cinco configuraciones: desminador, fresadora,
excavadora, cargadora y manipulador, según las necesidades en el terreno.
Gran fuerza de trabajo
Una fuerza de elevación de 110 kN y una fuerza de tracción de
casi 69 kN afrontan exigentes trabajos de movimiento de tierras e ingeniería.
Servicio fiable en el terreno
La baja tasa de averías y el sencillo mantenimiento in situ
reducen los tiempos de inactividad y las exigencias logísticas.
Servicio y funcionamiento incluso en terrenos exigentes
Servicio directamente en el terreno
El iRMP-3 está diseñado para que la mayoría de las
intervenciones de servicio puedan realizarse directamente en el lugar de despliegue, sin
necesidad de retirar la máquina del entorno de riesgo.
Fácil acceso a los puntos de servicio
El diseño de la máquina permite un acceso rápido
a los componentes y conjuntos clave. Esto reduce el tiempo de mantenimiento y de las posibles
reparaciones en el terreno.
Baja tasa de averías, más trabajo
Gracias a su baja tasa de averías y a su sencillo
mantenimiento, el iRMP-3 permanece operativo durante más tiempo. Esto se traduce en menos
tiempo de inactividad y una mayor disponibilidad de la máquina durante la misión.
Equipos adicionales
El iRMP-3 está diseñado como una plataforma robótica modular que convierte un único chasis de control remoto en una máquina especializada según la misión del momento. Gracias a su potente sistema hidráulico y al rápido cambio de módulos de trabajo, el operador puede adaptar la máquina a una tarea determinada directamente en el terreno: desde el desminado y el movimiento de tierras hasta la manipulación de cargas.
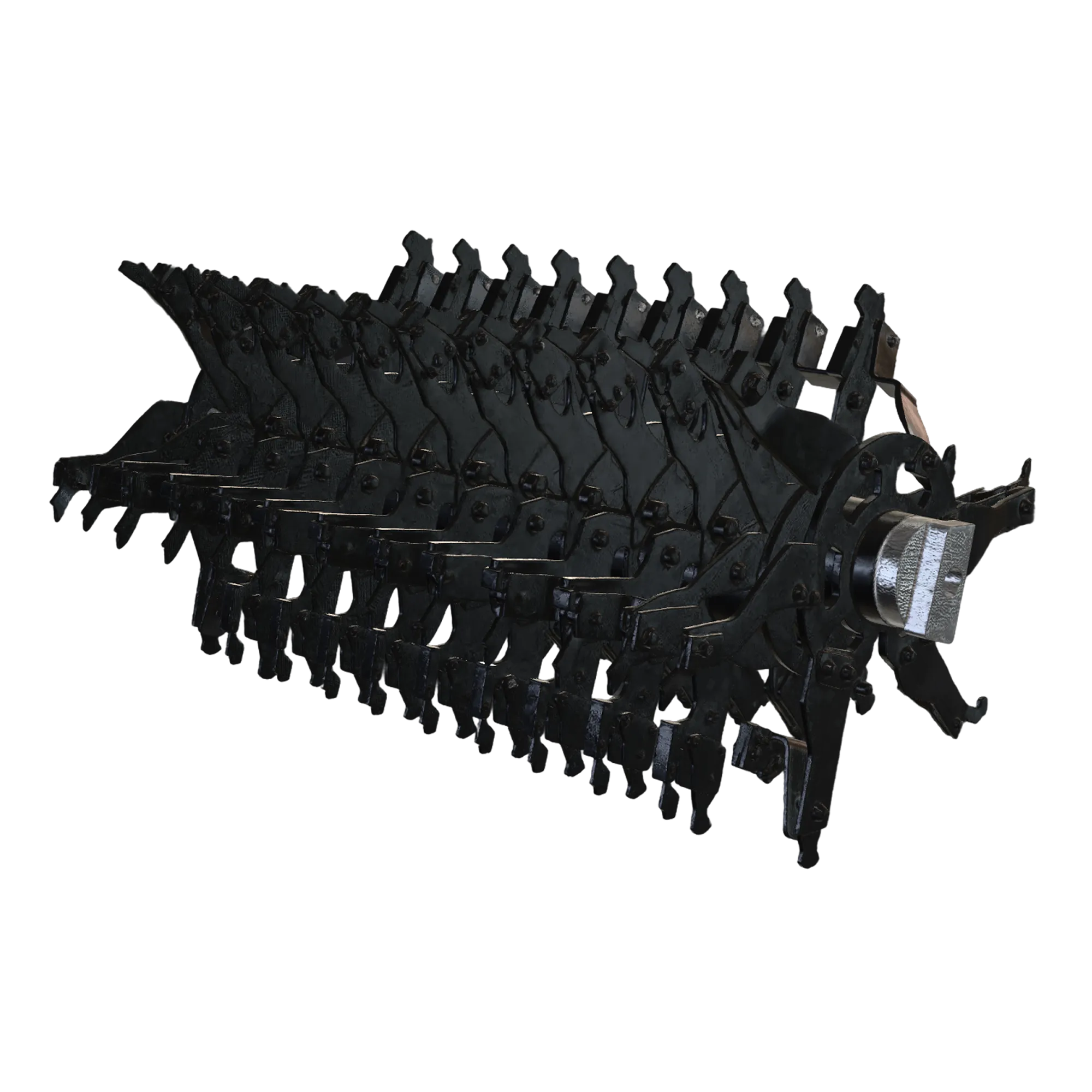
Módulo de desminado
El módulo principal de la plataforma, diseñado para limpiar de
forma segura terrenos contaminados. La unidad de trabajo, de 3400 mm de ancho, procesa el
suelo hasta una profundidad de 50–350 mm y elimina los artefactos explosivos sin presencia
del operador en la zona de riesgo.
Módulo de fresado
Una fresadora robusta para romper y procesar superficies duras,
suelo cubierto de vegetación o capas compactadas. Apta para la preparación del terreno y
como complemento de los trabajos de desminado en condiciones exigentes.
Excavadora
Un módulo para trabajos de tierra de precisión: excavación de zanjas,
ahondamiento y modelado del terreno. Permite que la máquina trabaje allí donde se requiere
una excavación controlada en lugar de una carga a gran escala.
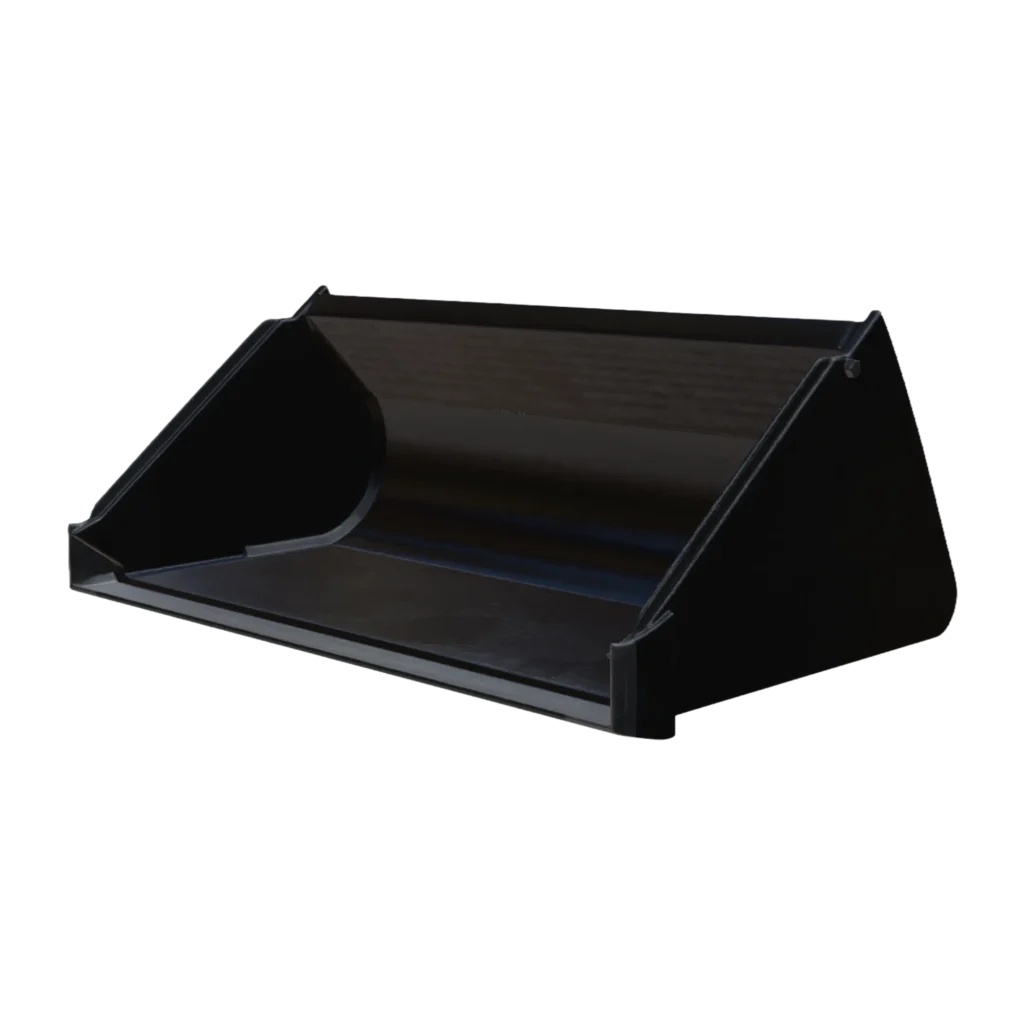
Módulo cargador
Un potente cazo de 0,85 m³ para movimiento de tierras, carga y
traslado de material a granel. Su fuerza de elevación de 110 kN afronta incluso los ciclos
exigentes en operaciones de saneamiento y construcción.
Brazo robótico (manipulador)
Un brazo robótico para agarrar y manipular material
voluminoso o peligroso. Amplía la plataforma con operaciones precisas a distancia: desde el
traslado de cargas hasta el trabajo con cargas en entornos de riesgo.
Módulo de perforación
Una barrena hidráulica para perforar orificios en el terreno:
colocación de postes, cimentación o trabajos de ingeniería preparatorios.
Solicite un precio para el iRMP-3
Le interesa una máquina robótica modular de control remoto? Rellene el formulario y le
prepararemos un presupuesto sin compromiso, junto con información más detallada sobre la
máquina.





{kind=link}
{kind=link}